Stewart Platform
Aim:
To fabricate Stewart Platform, and control it with Arduino
Components Used:
- Arduino Uno
- MG995 Servos x 6
- Servo Horns x 6
- Rod End Bearing Spherical Joints - 6mm x 12
- Metal shafts with threading - 6mm x 6
- LM2596S DC-DC Buck Converter x 3
- Power Source AC-DC 12V-2A supply
- Screws and nuts- M3 x 6
- Jumper Wires
3D Printed Parts:
Upper Base x 1
![57a2bddcdc0b02bc1e7dde2dfc4587f4.png]()
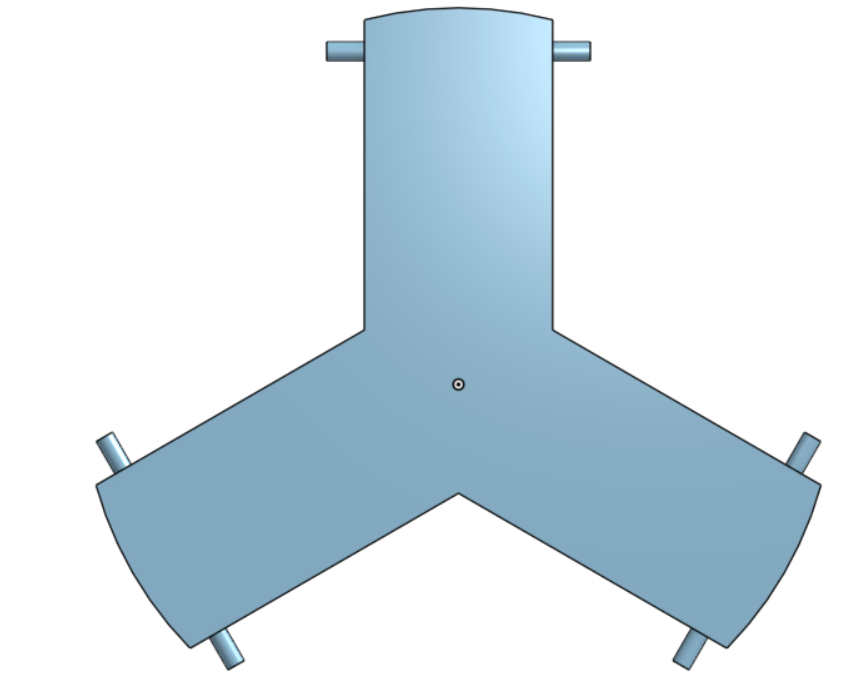
Used as upper part of the system, which we are supposed to move. It has extrusion for the “Rod End Bearing Spherical Joints”
Connector x 6
![ac81e1a248155f420b5fb6678cda511b.png]()

Used for connecting hole of “Rod End Bearing Spherical Joints” (6 mm), to the hole of Servo horns (3 mm)
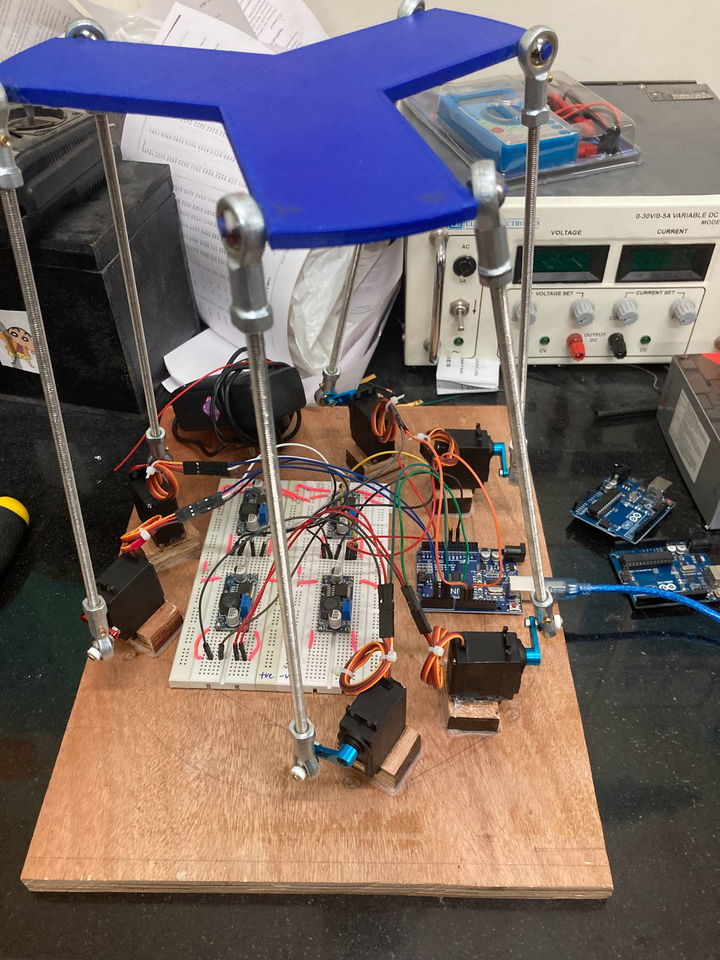
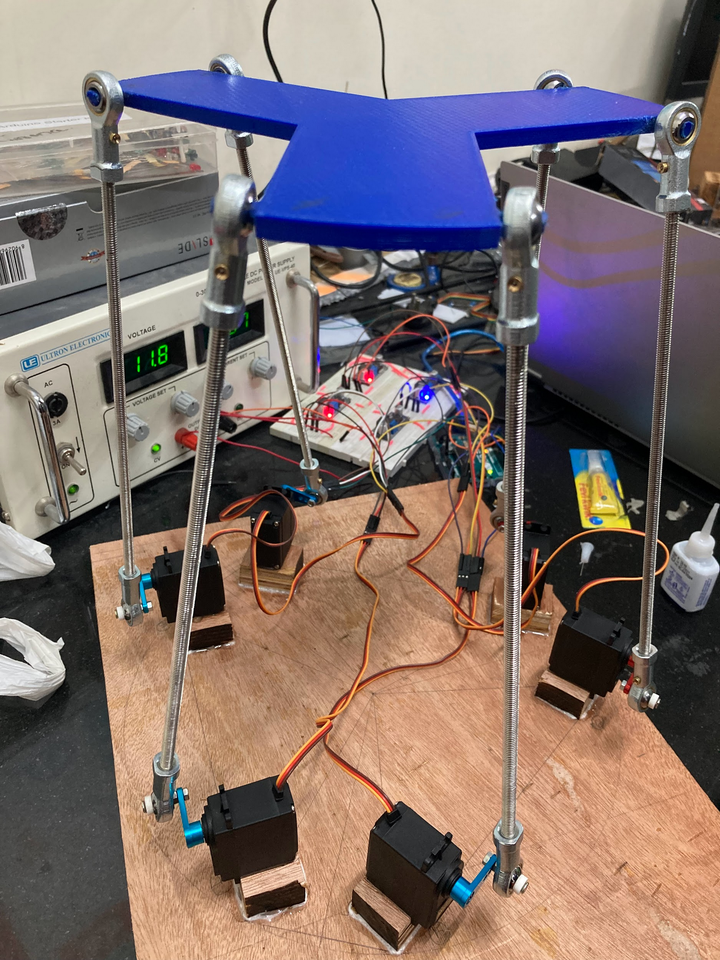
Fabricated Model

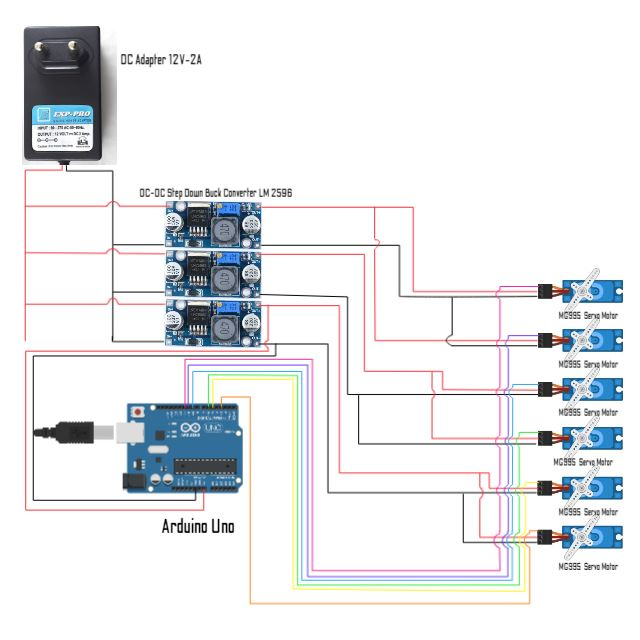
Circuit Diagram
Implementation
Vertical Motion
The upper base moving vertical up and down
Twisting Motion
Twisting the upper plane with respect to vertical axis
Horizontal Circular Motion
Moving the whole upper plane in it’s plane in a circular motion